
MARS OPERATIONS
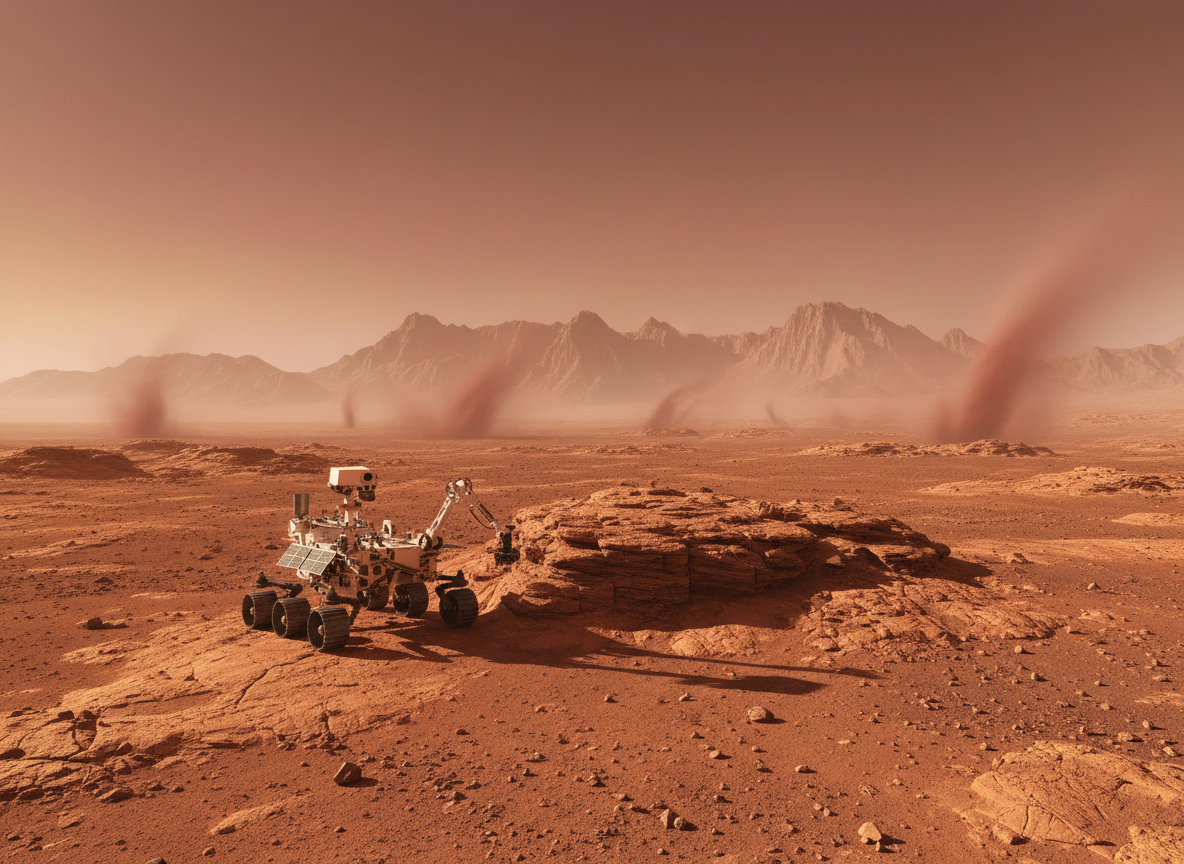
Long-range autonomous robotic systems for Mars surface science, subsurface drilling, terrain engineering, and aerial reconnaissance. Designed for multi-year operations under extreme conditions with minimal ground intervention.
Drilling deeper than any prior Mars mission.
TerraNaut VII will extend subsurface science capabilities far beyond current rover programs. Combined with Ares-Walker X's ability to operate in terrain no wheeled vehicle can access, and Ingenuity-OEX's aerial mapping, the Mars fleet represents a step change in surface exploration capability.
Engineering ArchitectureDeep Subsurface Drilling
Deploy TerraNaut VII to drill to depths exceeding 10 meters at geological priority sites in the Jezero and Isidis basin regions. Extract continuous core samples for real-time onboard mass spectrometry and Raman spectroscopy analysis.
Biosignature Detection
AI-driven geochemical analysis will flag anomalous readings consistent with potential biosignatures. Priority uplink to OEX Mars Mission Control without waiting for ground confirmation — accelerating the pace of discovery.
Complex Terrain Operations
Ares-Walker X will traverse boulder fields, lava tubes, and steep crater walls inaccessible to wheeled rovers. Dual six-degree-of-freedom robotic arms will perform precision structural assembly and inspection tasks.
Aerial Reconnaissance
Ingenuity-OEX Aero Scout will provide aerial perspective on terrain traversability, high-resolution mapping at sub-10 cm resolution, and atmospheric science data collection during every flight sortie.
JOIN THE MARS PROGRAM
We're building the robotic workforce for Mars. Partner with us on surface science, engineering, or mission operations.