
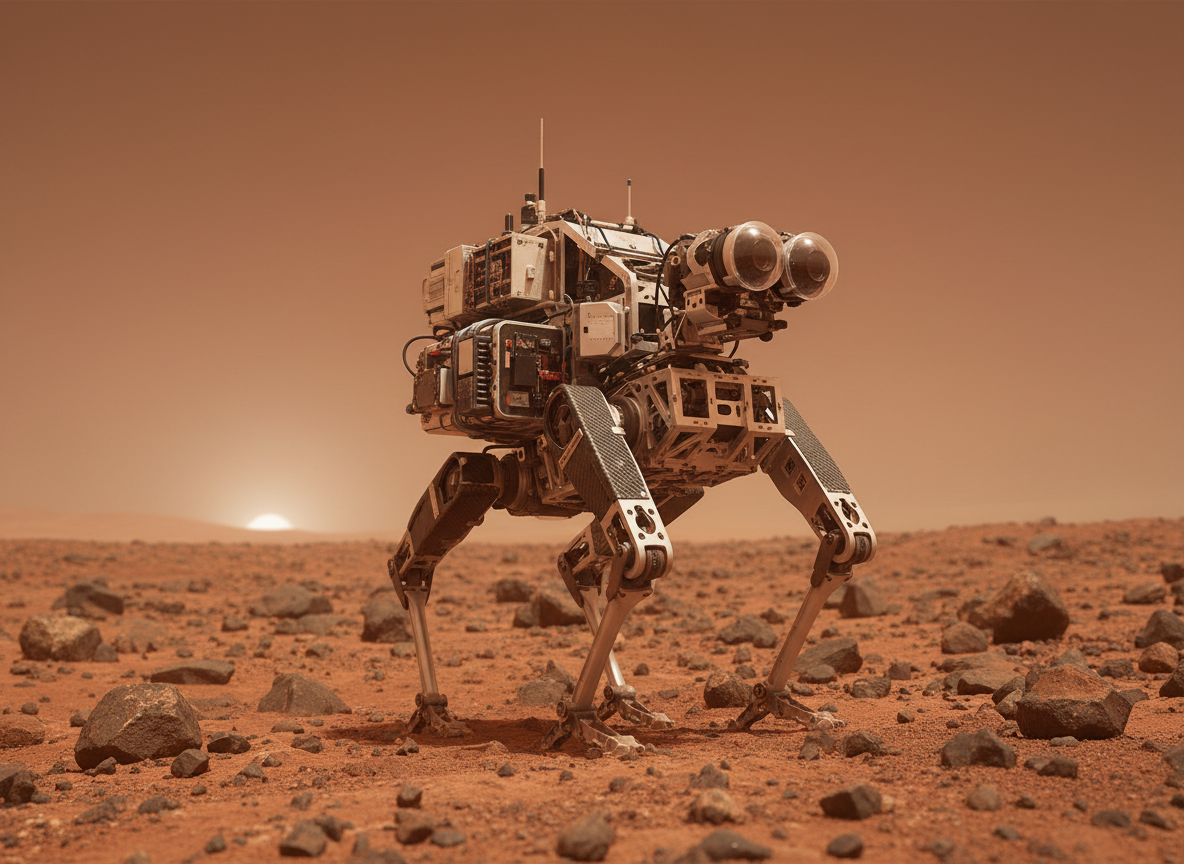
Ares-Walker X
Bipedal Surface Engineering Robot — Mars Surface Engineering & Construction Division
Program Overview
Ares-Walker X will be OrbitExSpace's first legged surface robot for Mars. Where wheeled rovers are confined to relatively flat terrain, Ares-Walker X will operate across the full range of Martian surface conditions, including rock-field interiors, lava tube entrances, and near-vertical crater walls — environments where no prior Mars mission has been able to conduct in-situ science.
The vehicle will be developed in close coordination with the JPL-heritage legged robotics community, incorporating validated actuation and control methodologies while introducing AI-driven gait adaptation that will exceed prior Earth prototype benchmarks. Mars analog terrain testing will begin at Atacama Desert facilities in 2027.
Department
Mars Surface Engineering & Construction Division
Analog Test Sites
Atacama Desert, Iceland lava fields
Mission Duration
Continuous surface operations
Locomotion Type
Quadrupedal AI gait control
Technical Specifications
Locomotion
Quadrupedal, 4 articulated legs
Mass
~340 kg
Power Source
RTG primary + kinetic recovery
Payload Capacity
80 kg external load
Step Clearance
90 cm vertical obstacle
Slope Rating
55° incline traverse
AI Architecture
Neural Autonomy v4, real-time biomechanics
Manipulation
Dual 6-DoF robotic arms, tool interface
Operational Duties
Complex Terrain Navigation
Ares-Walker X will traverse boulder fields, lava tubes, and steep crater walls inaccessible to conventional wheeled rovers. Its quadrupedal gait system will be capable of negotiating terrain profiles that would immobilise any existing Mars surface vehicle.
Habitat Module Assembly
Using its dual six-degree-of-freedom robotic arms, Ares-Walker X will perform precision structural assembly tasks on pressurised habitat modules, antenna systems, and power infrastructure. Assembly tolerances will be maintained to ±2 mm by onboard laser alignment systems.
Structural Inspection
The vehicle will conduct periodic close-up structural inspection of all pressurised surface assets, using visual and ultrasonic sensor suites to detect micro-fractures, seal degradation, and fastener integrity issues before they become mission-critical failures.
Science Instrument Deployment
Ares-Walker X will transport and position science instruments at locations designated by mission geologists, including cliff faces, subsurface pits, and unstable terrain where wheeled assets cannot safely operate.
Emergency Recovery Operations
In the event of a rover mobility failure, Ares-Walker X will be dispatched to physically extract the stricken vehicle or recover critical hardware and sample caches from the site. It will serve as the surface recovery asset for all OEX Mars programs.